火星第一座城市不應該從太空人踏上一片空地,然後開始思考今晚睡哪裡。它應該在好幾年前就開始:機器一波波降落、醒來、自檢、搬運土壤、接上電力、鑽探水冰、建造屏蔽、試種作物,並把乏味但重要的狀態報告傳回地球。
機器人對火星來說不是未來奢侈品,而是從探險走向定居的橋梁。如果人類在基本系統被證明前抵達,每個問題都會變成乘員緊急事件。如果機器人先到,許多失敗可以在人沒有站在吊車下、沒有呼吸那套空氣、也沒有依靠那座溫室吃晚餐時發生。
對嚴肅的火星遷徙計畫來說,問題不是機器人要不要幫忙,而是第一批大型乘員離開地球之前,機器人必須完成多少工作。
貨物先行,也代表風險先行
火星定居點需要大量物資:棲息地、壓力艙、氣閘、反應爐或太陽能場、電池、探測車、鑽機、備件、醫療設備、食物系統、水箱、通訊、著陸墊、施工工具和屏蔽。把這一切和第一批乘員一起送去,既危險也低效。更安全的模式是貨物先行部署。
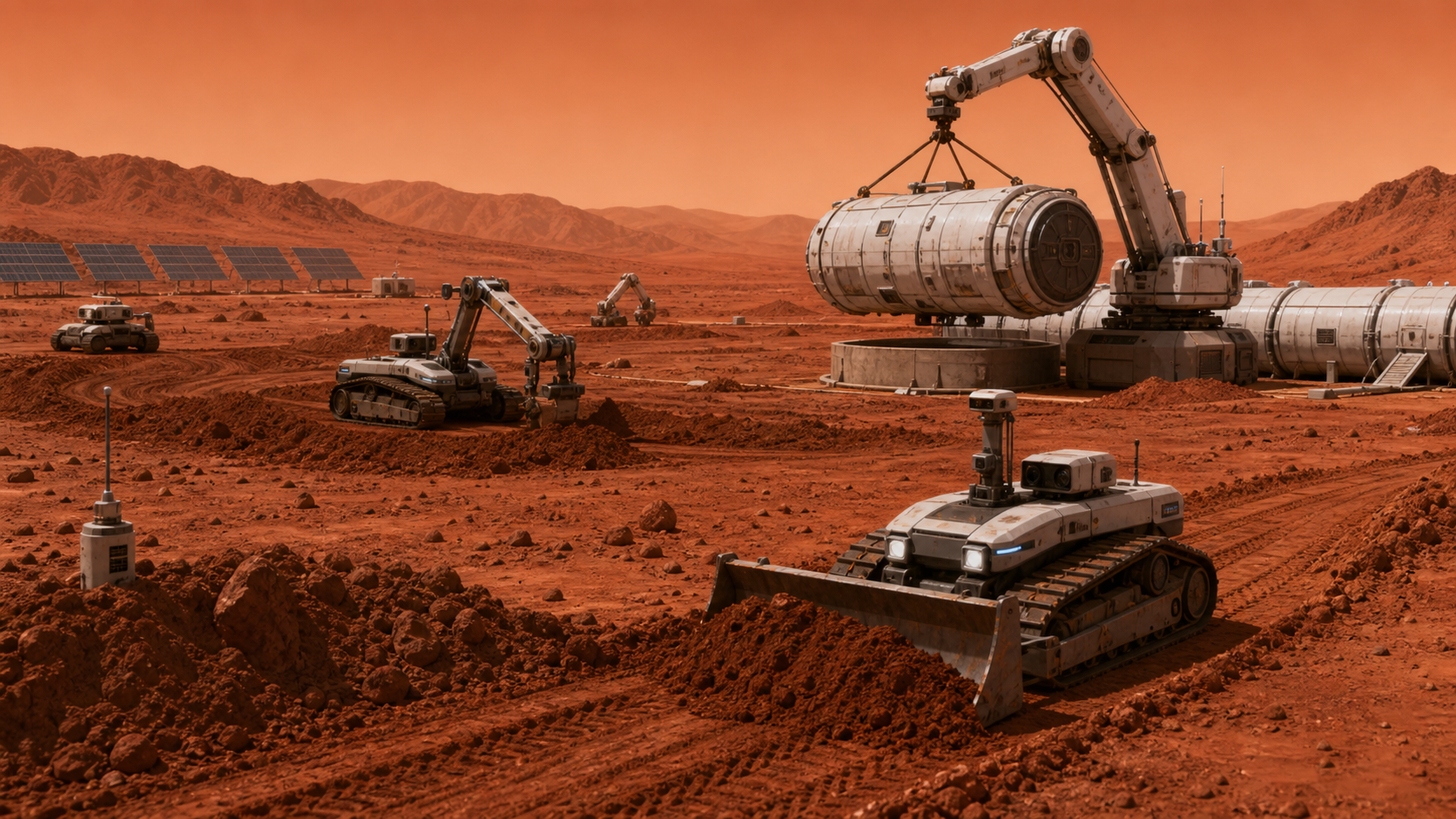
但貨物本身還不夠。一個靜靜躺在火星上的棲息地,還不是定居點。它必須在著陸後被檢查、整平、連接、加壓測試、供電、覆蓋屏蔽並免受灰塵影響。太陽能板要展開與清潔。電纜要布線。水箱要查漏。著陸區要勘查危險。完成這些工作的機器,會成為第一批施工隊。
這會改變任務設計。規劃者不再只問太空人一天能在艙外工作多久,而是問機器人系統能在乘員抵達前完成多少。人類任務會變成交接,而不是救援行動。
機器人必須搬土

第一個重要的機器人工作並不華麗:搬土。火星風化層可以成為屏蔽、土堤、著陸墊材料、道路基底、壕溝覆蓋層和建造實驗原料。讓人穿著太空衣手動搬運會緩慢、危險且極度疲累。機器推土車、裝載機、鏟輪、鑽機、小型運輸車和整平機,可以在人抵達前完成重活。
風化層處理也與水密切相關。許多定居計畫依賴尋找與開採地下冰。這需要勘探、鑽探、加熱或機械取樣、淨化、儲存和污染控制。水能支持生命、種植作物、製造氧氣、提供輻射屏蔽,也能供應燃料化學所需的氫。能可靠開採含冰物質的機器人,不只是一台機器,而是定居點代謝系統的一部分。
NASA 曾研究 RASSOR 等概念,這是一種為低重力挖掘設計的輕量機器挖掘機;毅力號探測車也搭載 MOXIE 實驗,從火星大氣中的二氧化碳製造氧氣。這些不是完整城市系統,但指向明確方向:盡可能使用本地資源,並在把人命押上大型系統前,先證明小型流程可靠。
第一批建造者可能先是檢查員
建造只是工作的一部分。檢查可能更重要。火星設備必須承受發射、巡航、進入、下降、著陸、熱循環、灰塵、振動,以及數月或數年的等待。地球上看起來完美的壓力密封,可能被著陸載荷傷到。電力接頭可能被灰塵堵住。熱輻射器可能被土堤遮蔽。探測車輪可能在人看見之前就出現裂縫。
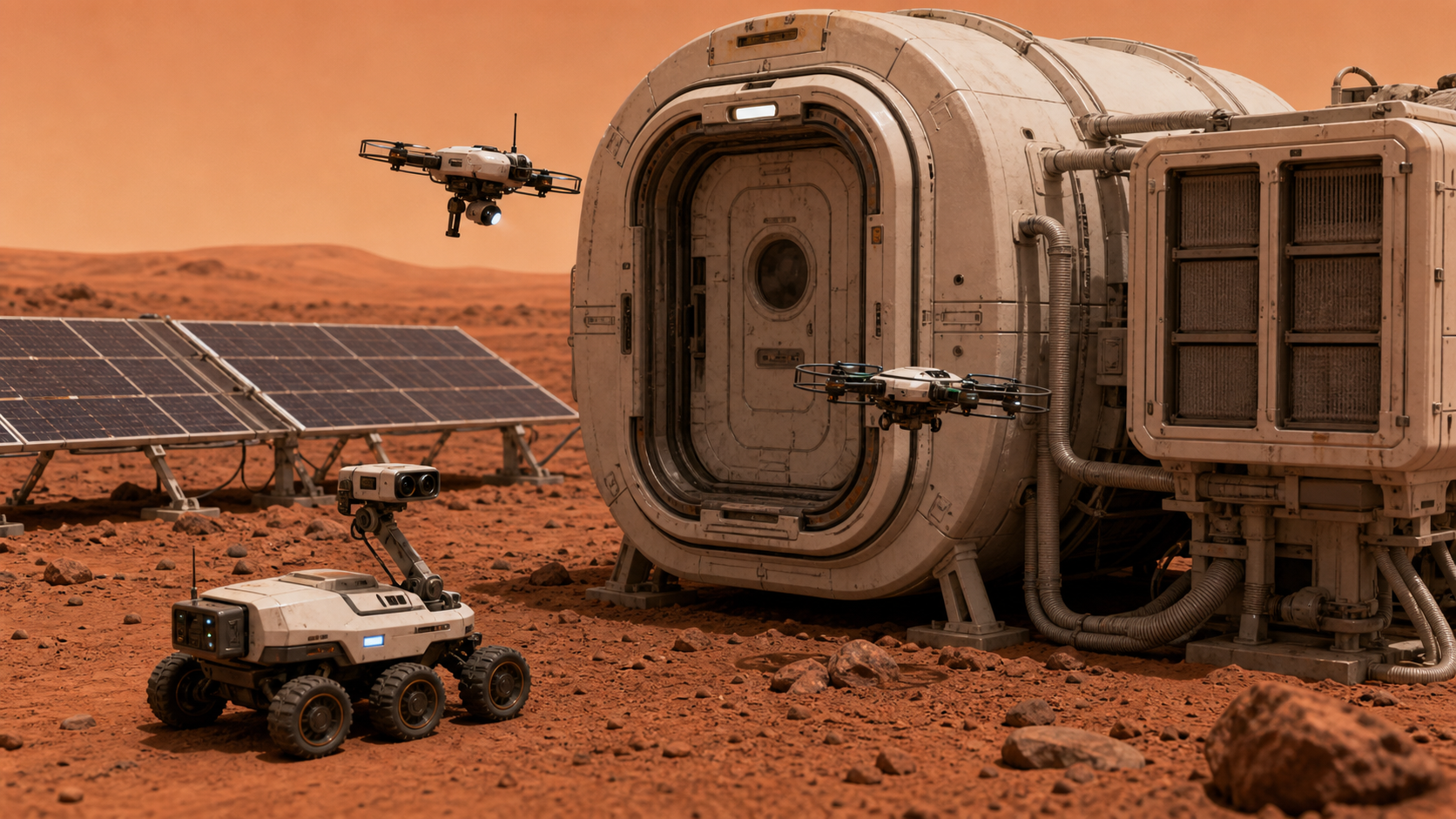
機器檢查員可以及早繪製這些問題。小型探測車可以爬到著陸腳和氣閘周圍。攀爬機器人可以檢查水箱和棲息地外殼。飛行無人機在火星稀薄大氣中並不容易,但機智號證明小尺度動力飛行在火星可行。未來空中偵察機可以勘查路線、灰塵堆積、電纜路徑和施工區。
重點不是永遠取代人類,而是讓人類抵達時面對一個已知、有儀器監測、部分修復過的環境。第一批乘員應該在抵達前就知道哪個艙門卡住、哪個幫浦有噪音、哪串太陽能板表現較差,以及哪台探測車需要更換軸承。
自主工廠能降低對地球的依賴
每一座火星城市一開始都是進口經濟。地球會送來精密機器、電子設備、藥品、密封件、感測器、工具和替換零件。但運輸延遲很長,發射窗口有限,緊急狀況不會等下一次貨運機會。定居點越能在本地製造和修復,越不脆弱。
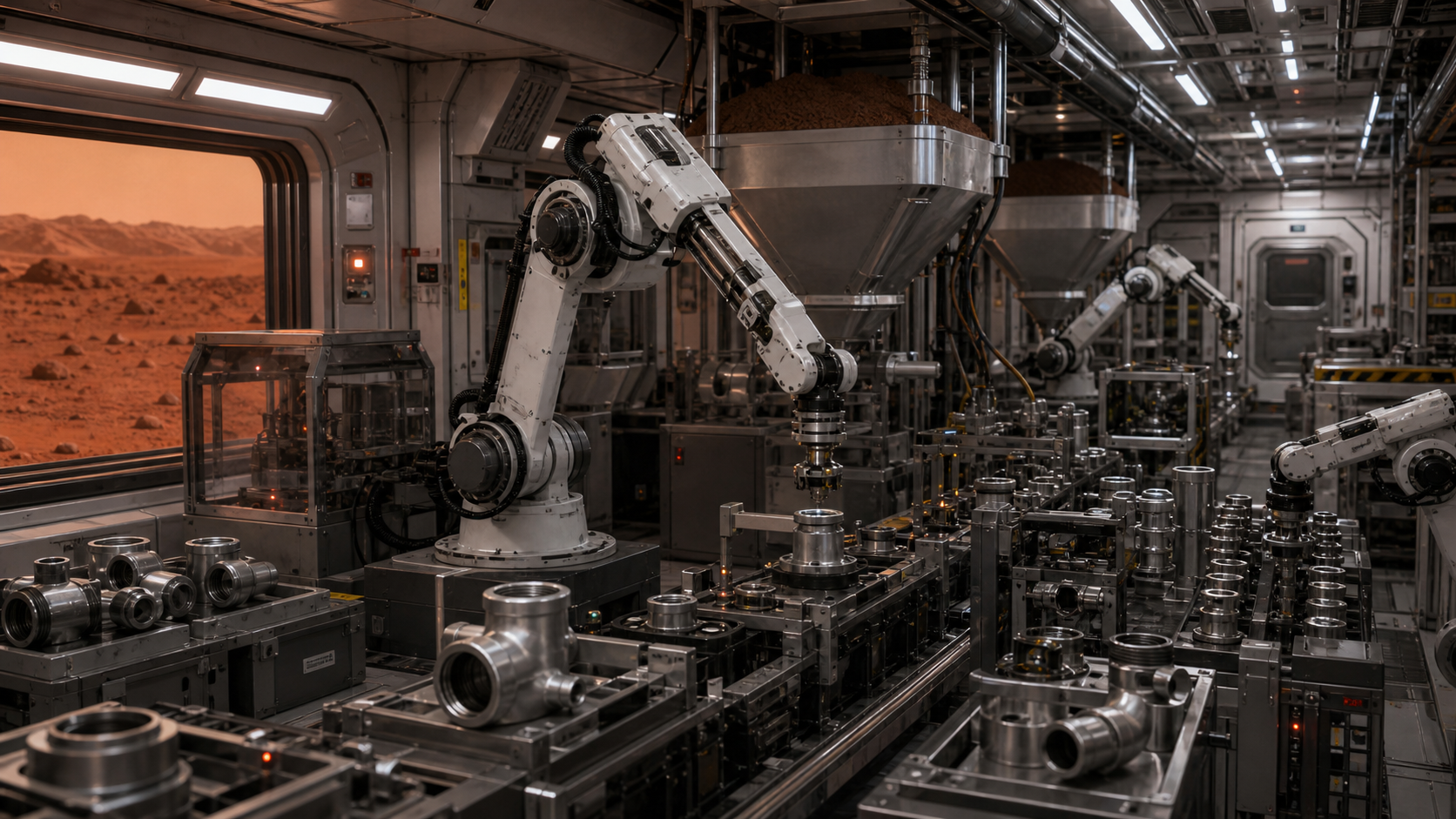
自主製造不必從整艘火箭或壓力艙開始。它可以從支架、管路支撐、簡單工具、探測車零件、溫室托盤、風化層磚、替換外殼、電纜夾、隔熱板和測試件開始。機械手臂、電腦控制銑床、增材製造、燒結和材料分類,可以把儲備原料與本地材料變成有用零件。
品質控制才是困難處。列印零件用作層架支架是一回事,用在壓力系統內又是另一回事。火星工廠必須包含檢查、認證、可追溯性,以及對本地製造零件用途的保守規則。自主性只有在定居點能信任結果時才有價值。
食物系統也需要機器照護

人類乘員不應該著陸後才發現溫室漏氣、幫浦堵塞、營養循環漂移,或作物照明過熱。如果農業是生命保障計畫的一部分,機器人應該在人抵達前運行測試溫室。它們可以播種、監測、修剪、採收樣本作物、清潔濾網、偵測害蟲或黴菌,並回報系統在不同季節中的表現。
這不只是食物問題。植物會與水回收、濕度、二氧化碳、氧氣、微生物控制、廢棄物處理和乘員心理互相作用。機器人溫室是一座生命保障實驗室。如果它在乘員抵達前失敗,工程師可以在人依賴它之前重新設計。如果它成功,第一批乘員抵達時擁有的是數據,而不是希望。
AI 監控需要邊界
火星機器人需要自主性,因為地球不可能即時搖桿控制。指令跨越行星距離需要數分鐘,回傳訊號還要再等數分鐘。機器人必須能導航、避開危險、排序任務、安全暫停、診斷故障,有時也要不等地球回覆就選擇下一個最佳動作。
但這不代表把定居安全交給神秘黑箱。最安全的自主系統會分層:清楚目標、保守限制、本地感測器、遠端監督、自動安全模式、人類審查,以及高風險動作的硬性規則。機器人可以決定如何繞過石塊,但不應該隨意重新加壓受損模組、打開污染管線,或在未確認許可下把重設備移近棲息地。
好的自主性會讓火星更適合人類,而不是更不人性。它移除重複危險、收集更好數據,讓乘員把時間用在決策、維修、科學、醫療和社群生活上。
仍然未解的問題
最困難的機器人問題,是遠距可靠性。即使在地球上,有備件、技師、倉庫和救援隊就在附近,機器仍然會壞。在火星上,每個接頭、軸承、電池、感測器、電纜、車輪、致動器和軟體更新,都會成為信任長鏈的一部分。灰塵會卡住機構。低溫會削弱電池。輻射會干擾電子設備。一次簡單維修可能需要另一台機器人,而那台機器人也可能需要維修。
答案不是一台完美機器人,而是一個生態系:簡單耐用的機器、專用工具、冗餘機隊、標準接頭、自檢程序、可替換模組、共享備件,以及能優雅失效的設計。火星機器人最好是令人放心的無聊。它們應該一次又一次地挖掘、檢查、清潔、連接、測量和回報,直到人類抵達。
如果機器人能先把火星建好到足夠程度,人類抵達的性質就會改變。第一批定居者踏入的是一個已準備、有儀器監控、部分運作的世界。他們仍然面對危險,但不是最糟的危險:抵達一個沒有測試過庇護所的死寂工地。未來火星城市可能會以人類名字被記住,但它最早的地基會是機器人打下的。
Leave a Reply